
 网站地图
网站地图 RSS订阅
RSS订阅

- 联系人:顾景明 (经理)
- 电话:025-84303938 84303748
- 手机:(0)13809002093
- 传真:025-84303938 84303891
- 地址:南京市秦淮区高桥门200号银龙翠苑10幢106室
 混合式步进电机
混合式步进电机






57、60、86BYG系列
产品型号及参数
型 号 | 步距角 | 相数 | 驱 动 电 压 (V) | 相 电流(A) | 保 持 转 矩(N·M) | 空载起动频率(步/秒) | 空载运行频率(千步/秒) | 转 动 惯 量(Kg·cm2) | 相 电 感(mH) | 相 电 阻 (Ω) | 重 量 (Kg) |
价格 (元) |
57BYG4501 | 0.9/1.8° | 2/4 | 36 | 1.5 | 0.6 | 1200 | ≥20 | 0.135 | 1.4 | 1.5 | 0.5 |
|
57BYG4502 | 0.9/1.8° | 2/4 | 36 | 1.5 | 0.85 | 1200 | ≥20 | 0.22 | 3.0 | 2.0 | 0.6 |
|
57BYG4503 | 0.9/1.8° | 2/4 | 36 | 1.5 | 1.0 | 1200 | ≥20 | 0.3 | 2.4 | 1.6 | 0.8 |
|
57BYG4504 | 0.9/1.8° | 2/4 | 36 | 1.5 | 1.4 | 1200 | ≥20 | 0.46 | 1.67 | 1.1 | 1.1 |
|
*57BYG3501 | 0.6°等 | 3 | 36 | 2.4 | 0.5 | 1600 | ≥20 | 0.135 | - | - | 0.5 |
|
57BYG3502 | 0.6°等 | 3 | 36 | 2.4 | 0.7 | 1600 | ≥20 | 0.22 | - | - | 0.6 |
|
57BYG3503 | 0.6°等 | 3 | 36 | 3 | 0.85 | 1600 | ≥20 | 0.3 | - | - | 0.8 |
|
57BYG3504 | 0.6°等 | 3 | 36 | 3 | 1.1 | 1600 | ≥20 | 0.46 | - | - | 1.1 |
|
60BYG4502 | 0.9/1.8 | 2/4 | 36 | 2 | 1.8 | 1200 | ≥15 | 0.84 | 6 | 2.8 | 1.4 |
|
*86BYG4501 | 0.9/1.8° | 2/4 | 60 | 4 | 2.8 | 1200 | ≥15 | 0.8 | 4.4 | 1 | 2.3 |
|
86BYG4502 | 0.9/1.8° | 2/4 | 60 | 4 | 4.4 | 1200 | ≥15 | 1.4 | 4 | 0.47 | 3 |
|
86BYG4503 | 0.9/1.8° | 2/4 | 60 | 4 | 6.0 | 1200 | ≥15 | 2.7 | 6.5 | 0.53 | 3.6 |
|
86BYG4504 | 0.9/1.8 | 2/4 | 60 | 4 | 9.0 | 1200 | ≥15 | 3.6 | 6.9 | 0.5 | 5 |
|
*86BYG3502 | 0.6°等 | 3 | 60 | 3 | 4 | 1600 | ≥20 | 1.4 | - | - | 2.3 |
|
*86BYG3503 | 0.6°等 | 3 | 60 | 3 | 5.6 | 1600 | ≥20 | 2.7 | - | - | 3.8 |
|
![]() 注:
注:
1、打 * 者为正在开发的新产品,可供期货;型号后有“Z”者为增强型。
2、二相电机为四引出线,四相电机为八引出线,除出线方式不同外,其余参数性能完全一样,配本公司驱动电源时用二相电机。
四相电机可改接成二相电机,有串联、并联及单极性三种接法,按并联接法时,相电流应加倍,四相电机用并联接法时,高
速性能要优于其它接法。本公司产品中除35#,39#,42#,57#,86#四相电机外,其余均已按并联接法接成二相电机。
3、五相电机用五边形接法及三相电机用三角形接法时,驱动器电流应提高至表列相电流的1.7倍。五相及三相电机用星形接法时驱动器电流为相电流。五相电机用全桥驱动器及三相电机用三角形接法时,电机高速性能要优于其它接法,但温升略高。本公司三相电机除130BYG3501B/D和130BYG3502B/D为星形接法外,其余已接成△型接法,五相电机型号后有“WB”;“WZ”;“WJ”标志的为五边型接法,有“X”标志者为星型接法。
4、 表中驱动电压为带有参考意义的标准电压,电机可在低于标准电压或略高于标准电压的范围内正常使用,其值主要取决于驱动器。在力矩富裕的前提下,尽可能用较小的驱动电压和电流,以降低电机温升。
5、 二相及三相电机若用220 V输入电压驱动时一定要接地保护。
6、三相电机配MS 型三相驱动电源可按以下步距角细分运行:0.9°、 0.72°、 0.6°、 0.45°、 0.36°、0.3°、
0.225°、 0.18°、 0.15°、 0.12°、0.09°、0.072°、 0.06°、 0.05625°、0.045°、0.036°。
7、 表中空载起动频率及空载运行频率为半步工作状态下的参数。
电机外形及安装尺寸
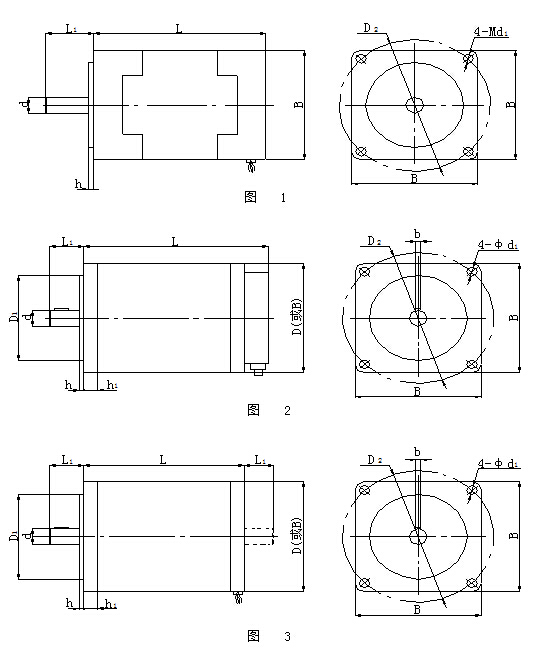
寸 型 号 | B | d (h7) | L1 | b | D1 (h7) | h | h1 | L | D2 | d 1 |
备 注
|
57BYG3501,4501 | 57 | 6.35 | 21 | - | 38.1 | 1.6 | 5.5 | 45 | 66.6 | 5 | 图 3 |
57BYG3502,4502 | 55 | ||||||||||
57BYG3503,4503 | 67 | ||||||||||
57BYG3504,4504 | 78 | ||||||||||
86BYG3501,4501 | 86 | 12.7 | 37 | - | 73 | 1.6 | 8.5 | 75 | 98.4 | 5.5 | 图 3 |
86BYG3502,4502 | 95 | ||||||||||
86BYG3503,4503 | 115 |

注: D型电机为双轴伸型,无键槽。
运行矩频特性(平均参考值)
电机型号 | 驱动电源 电压/电流 | 运 行 步 距 角 | N·M 运 行 矩 频 特 性 步/秒 | |||||||||
57BYG4501 | SMD2MS1 DC24V/1.5A (串联) | 0.9° | 0.38 100 | 0.34 200 | 0.34 500 | 0.32 1000 | 0.29 2000 | 0.25 3000 | 0.2 4000 | 0.1 6000 | 0.04 8000 | - |
57BYG4501 | SH-2H090M AC36V/4A (并联) | 0.9° | 0.42 100 | 0.4 200 | 0.44 500 | 0.47 1000 | 0.42 2000 | 0.4 3000 | 0.38 4000 | 0.28 6000 | 0.2 8000 | 0.18 10000 |
57BYG4501 | BY-2HB04M DC36V/4A (并联) | 0.9° | 0.4 100 | 0.34 200 | 0.36 500 | 0.38 1000 | 0.37 2000 | 0.36 3000 | 0.34 4000 | 0.34 6000 | 0.32 8000 | 0.26 10000 |
57BYG4502 | SMD2MS1 DC24V/1.5A (串联) | 0.9° | 0.72 100 | 0.66 200 | 0.69 500 | 0.6 1000 | 0.34 2000 | 0.14 3000 | 0.06 4000 | - | - | - |
57BYG4502 | SH-2H090M AC36V/3A (并联) | 0.9° | 0.64 100 | 0.6 200 | 0.68 500 | 0.7 1000 | 0.64 2000 | 0.52 3000 | 0.41 4000 | 0.28 6000 | 0.22 8000 | 0.16 10000 |
57BYG4502 | BY-2HB04M DC36V/3A (并联) | 0.9° | 0.66 100 | 0.62 200 | 0.64 500 | 0.64 1000 | 0.58 2000 | 0.58 3000 | 0.52 4000 | 0.42 6000 | 0.2 8000 | 0.1 10000 |
57BYG4503 | SMD2N2 AC36V/3.5A (并联) | 0.9° | 0.9 100 | 0.82 200 | 0.9 500 | 0.94 1000 | 0.92 2000 | 0.82 3000 | 0.74 4000 | 0.56 6000 | 0.5 8000 | 0.4 10000 |
57BYG4503 | SMD2N2 DC36V/3.5A (并联) | 0.9° | 0.98 100 | 0.9 200 | 0.96 500 | 0.94 1000 | 0.96 2000 | 0.84 3000 | 0.82 4000 | 0.74 6000 | 0.4 8000 | 0.3 10000 |
57BYG4503 | BY-2HB03M DC36V/3.5A (并联) | 0.9° | 0.82 100 | 0.8 200 | 0.82 500 | 0.8 1000 | 0.76 2000 | 0.74 3000 | 0.58 4000 | 0.56 6000 | 0.38 8000 | 0.28 10000 |
57BYG4503 | BY-2HB04M DC36V/3.5A (并联) | 0.9° | 0.94 100 | 0.86 200 | 0.94 500 | 0.94 1000 | 0.86 2000 | 0.82 3000 | 0.76 4000 | 0.66 6000 | 0.48 8000 | 0.3 10000 |
57BYG4504 | SMD2N2 AC36V/3.5A (串联) | 0.9° | 1.21 100 | 1.0 200 | 1.14 500 | 1.14 1000 | 1.08 2000 | 0.93 3000 | 0.78 4000 | 0.64 6000 | 0.47 8000 | 0.34 10000 |
57BYG4504 | SH-2H090M AC36V/4A (并联) | 0.9° | 1.08 100 | 0.92 200 | 1.06 500 | 1.02 1000 | 0.96 2000 | 0.86 3000 | 0.74 4000 | 0.46 6000 | 0.29 8000 | 0.28 10000 |
57BYG4504 | BY-2HB04M DC36V/4A (并联) | 0.9° | 1.04 100 | 1.02 200 | 1.08 500 | 1.04 1000 | 1.02 2000 | 0.96 3000 | 0.9 4000 | 0.56 6000 | 0.28 8000 | 0.16 10000 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
注: 1)以上数据为平均参考值,用户可据此绘成矩频特性曲线。
2)二相及四相电机在低频段100±20步/秒处有谐振区,工作时避开此区为佳。
3) 当电机的运行频率超过二分之一空载起动频率时,所用控制器应具有升降频功能。
4) 电机轴功率与转矩转速及频率间的关系
M(N·M)* n (转/分)= 9.55 * P(W)
n(转/分)= 步矩角 * f(步/秒)/ 6°